dr4wbck
The Idea
Initialy our Idea was to build the AxiDraw but with a Capsten-Drive to not need to have a typical belt and only need a rope or fishing line (and we wanted to try out a new technic :D.
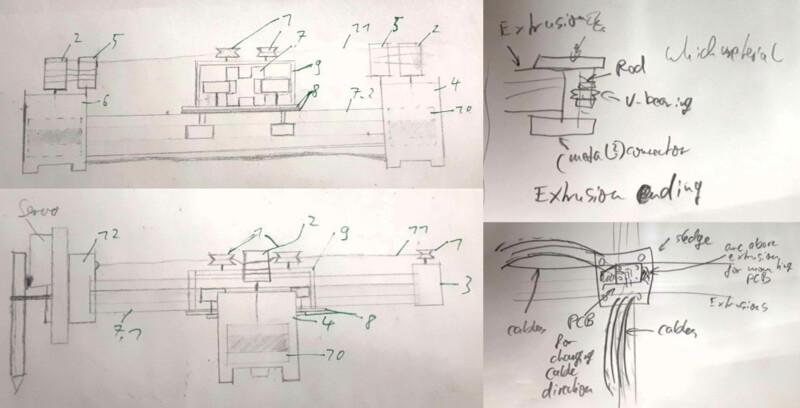
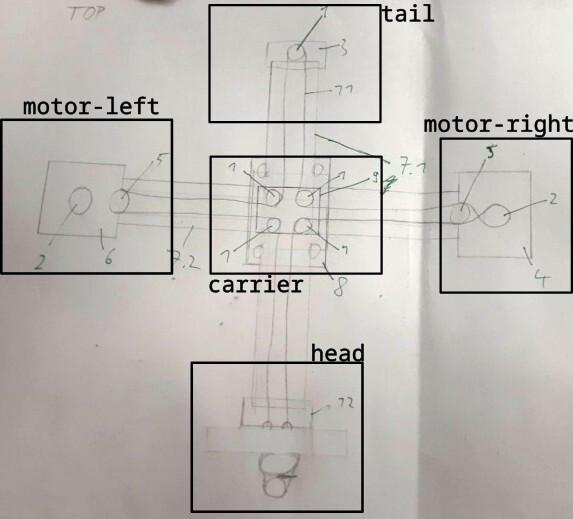
Initial Design
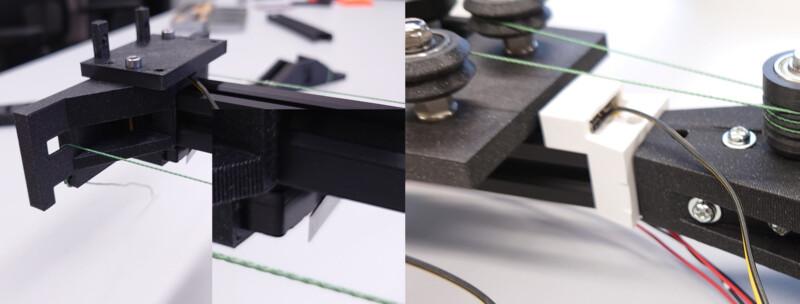
First Assembly
Continuation & Redesign

Setting up the Drivers
Setting up the Firmware
Getting it Running
#define BAUDRATE 250000
Determine Steps per Millimeter
// Enable one of the options below for CoreXY, CoreXZ, or CoreYZ kinematics,
// either in the usual order or reversed
#define COREXY
//#define CoreXZ
//#define COREYZ
//#define COREYX
//#define COREZX
//#define COREZY
/**
* Default Axis Steps Per Unit (linear=steps/mm, rotational=steps/deg)
* Override with M92
* X, Y, Z [, I [, J {, K...]]], E0 [, E1[, E2...]]
*/
#define DEFAULT_AXIS_STEPS_PER_UNIT { 102, 102, 400, 500 }