Projekte
- Vacuum cleaner
- Otto
- Rückenkratzer
- HSF-Radio
- MIoTy
- Projektseminar Prof. Husung
- Sensorhalter
- Gravierung USB-Hubs
- RC-Van
- Fab-Logo Brandeisen
- Repair of Headphones
- Reparatur Delonghi Siebträgermaschine
- PCB für ein Mischpult
- Ersatz-Zahnrad
- Jarni's robots
- 2leggedRobot
- Formulierung dehnbarer leitfähiger Tinten für 3D-Drucker vom Typ Direct Ink Writing (DIW)
- Reparatur Bosch-Handmixer MFQ3530/04
- Msys
- panema
- Stempel Bergfest
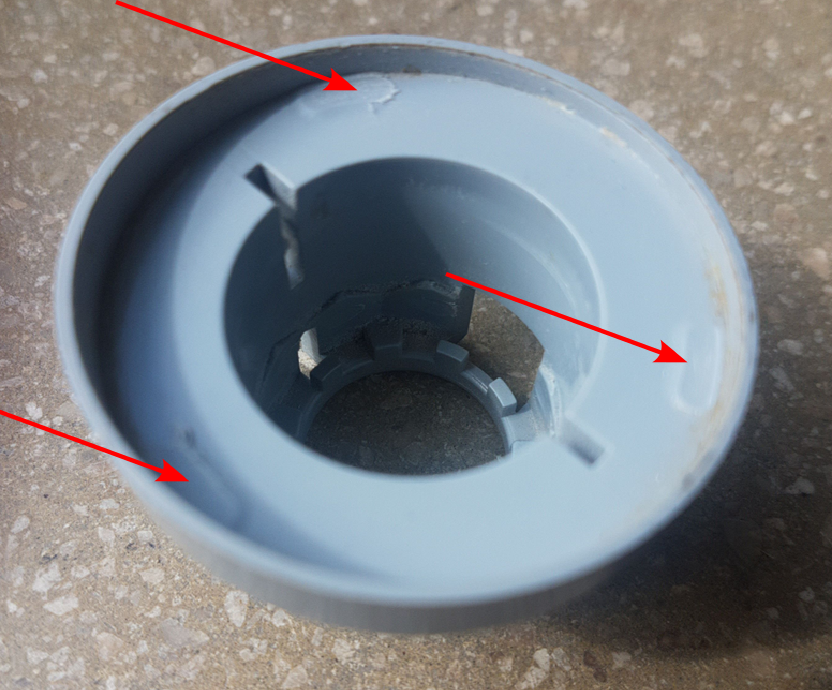
Vacuum cleaner
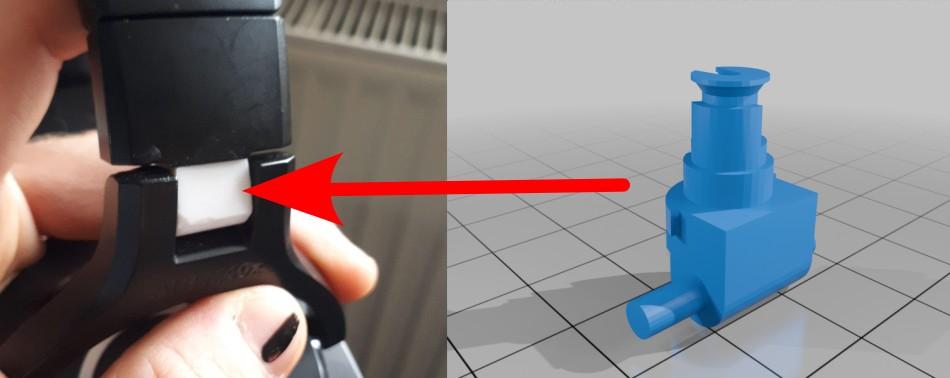
My neighbours gave me this vacuum-cleaner brush that didn't work anymore because it stopped spinning. The connecting piece was so worn out, that the "clutch" piece would spin freely inside it.

I 3D-scanned the clutch with our CR-Scan Raptor in blue laser mode. For this to work, you need several tracking points around the object.


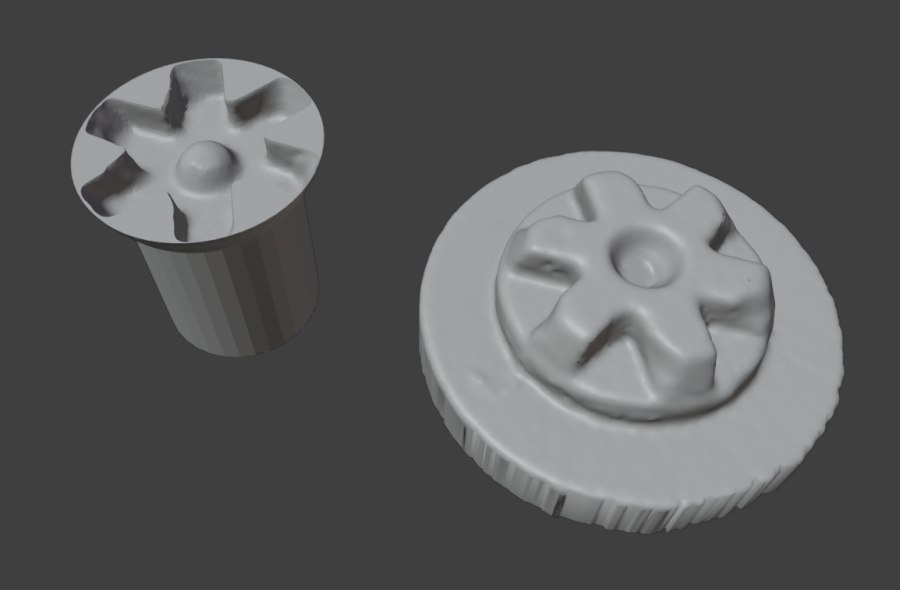
Here you can see the result of the scan.
I used blender to postprocess the data into a positive part and a negative copy that fits into the center of the brush.
In order to make it removable, I drilled a hole through my printed piece and the brush, in place of one of the screw holes. Now I can securely fix the part in rotation, but still dissasemble and replace it if neccesary.

This is what the finished result looks like:

Otto
Our fellow researcher M. Sc. Yonghuan Fu from the Fachgebiet Angewandte Nanophysik contacted us because he wanted to build a little robot in order to promote his sodium batteries.
Detailed information can be found at this link:https://fablab.tu-ilmenau.de/#!/projects/robots-powered-by-all-solid-state-sodium-ion-batteries
This work was supported by FabLab/UNIKAT and Otto Robot Open Source Project.
Rückenkratzer
Unsere Liebe Reinigungsfachangestellte Susanne hat mich gebeten Ihr einen Rückenkratzer zu drucken. Auf die Frage "Wie soll der denn aussehen?" hat Sie eine Geste mit der Hand gemacht, die ich ungehend mit unserem 3D-Scanner erfasst habe.

Obwohl sie beim Scan etwas gewackelt hat, ist ein relativ brauchbares 3D-Modell daraus geworden.



HSF-Radio
Our beloved Student radio HSF is celebrating its 70th birthday!
https://www.radio-hsf.de/
As a present we wanted to develop a HSF-Radio Soldering kit.
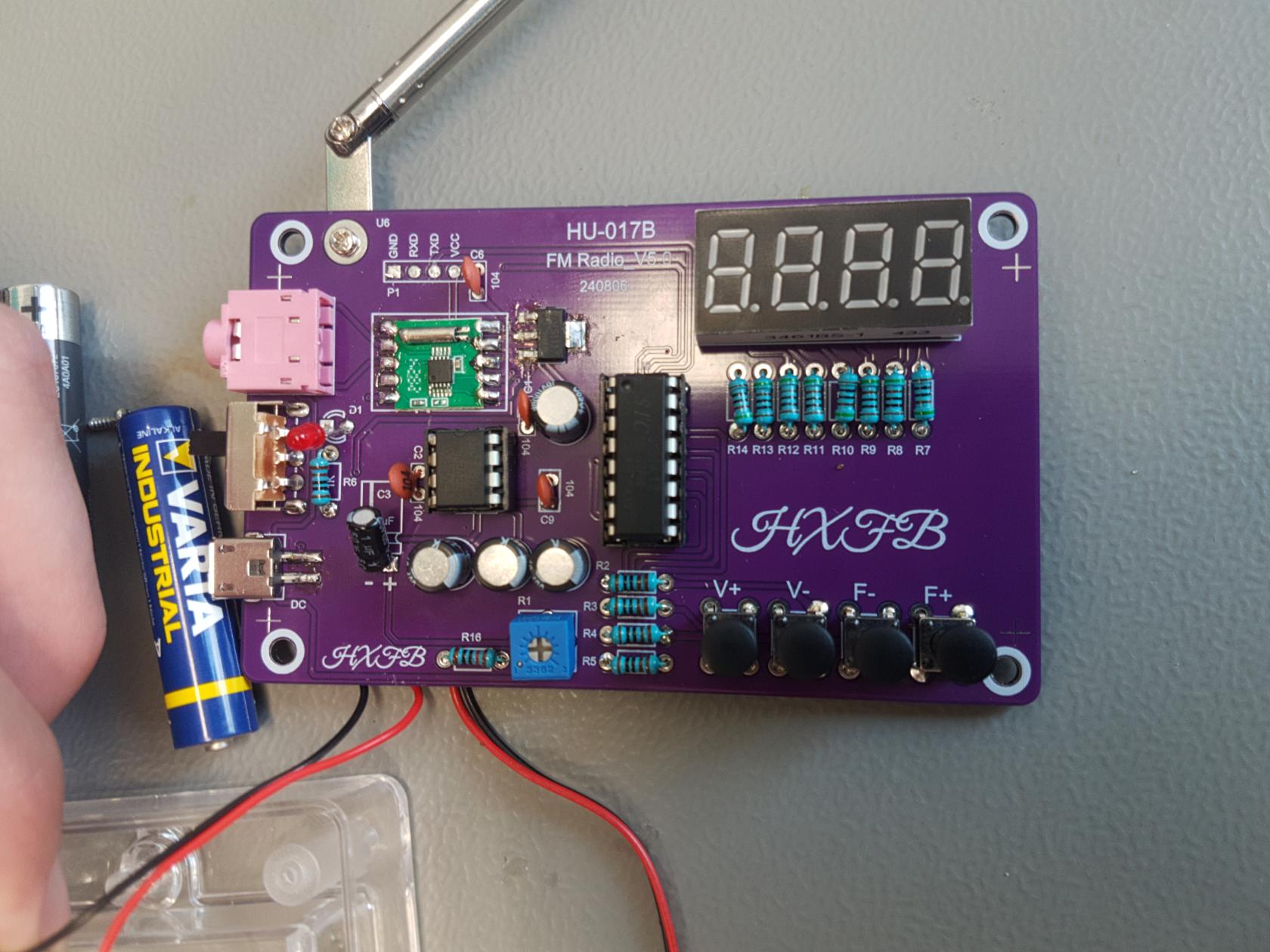
The first attempt was to try this this radio-kit from Aliexpress.
MIoTy
Thanks to Tim Hemmecke, we had a little MIoTy-Workshop in our FabAcademy Networking class.
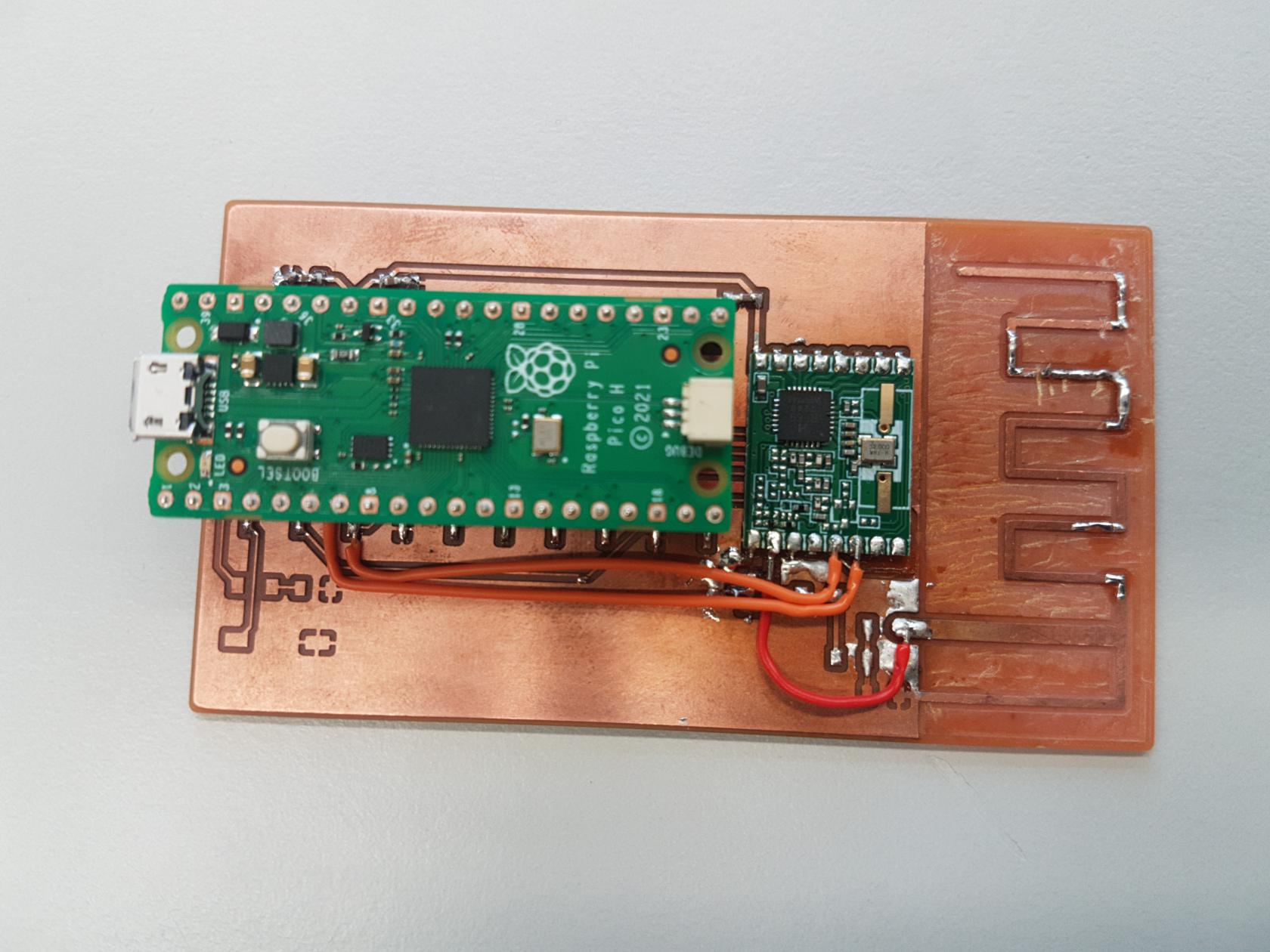
This is the boards we designed, milled and programmed.
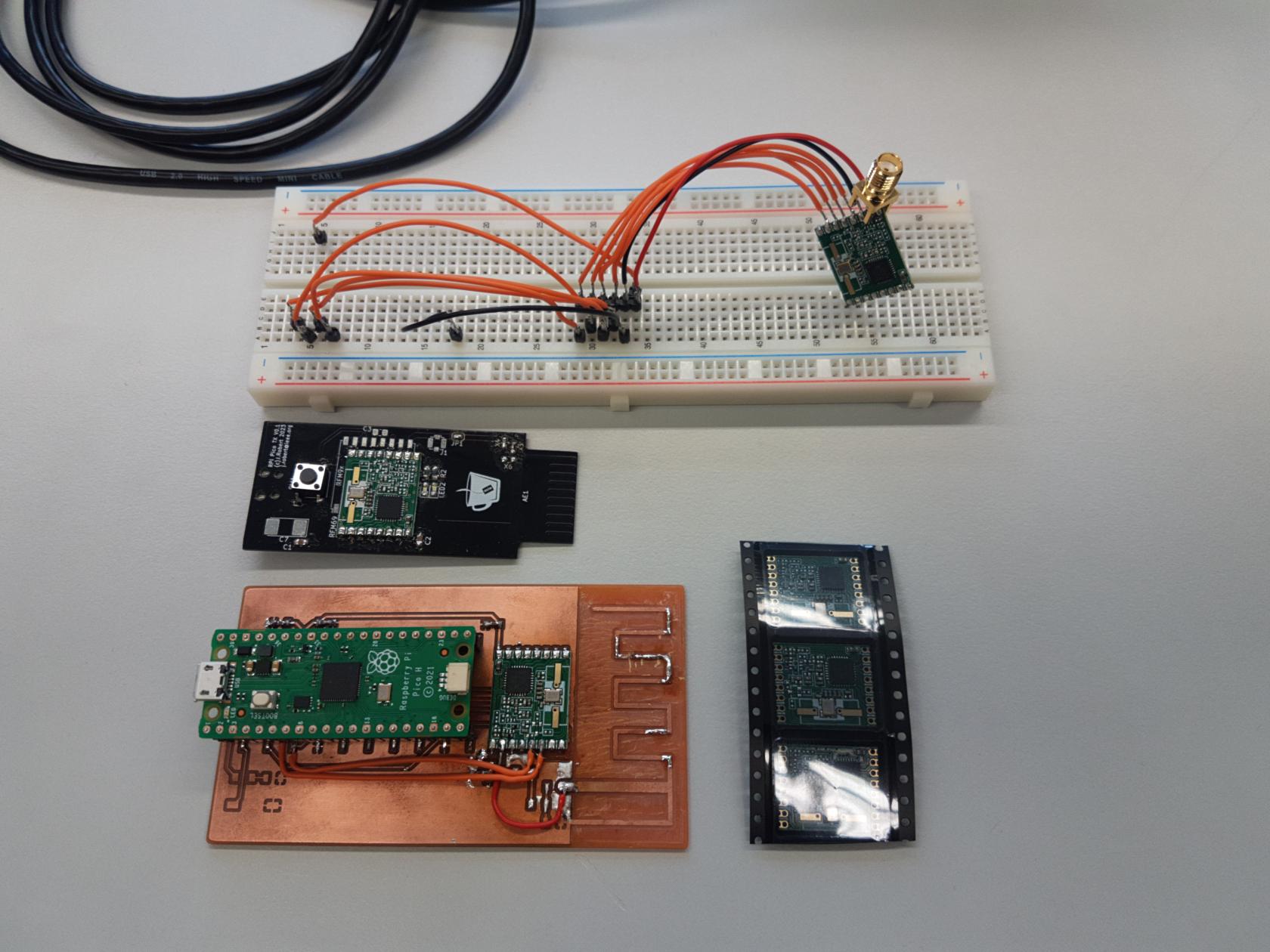
Another board made by Fraunhofer-Institut.

The mioty Gateway.
Projektseminar Prof. Husung
We build two prototypes for the Projektseminar of Prof. Husung.

This one, by Zhi-xi Koay, included milling the base on the carvera,
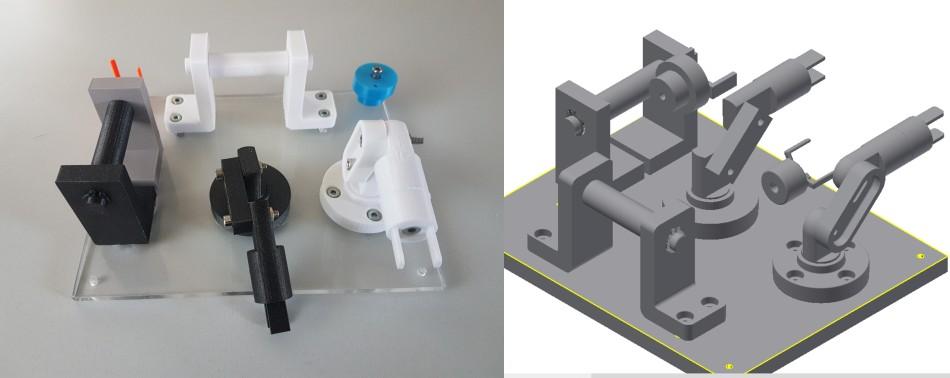
while this one from Mustafa Alan has a laser-cut base from Acrylic.
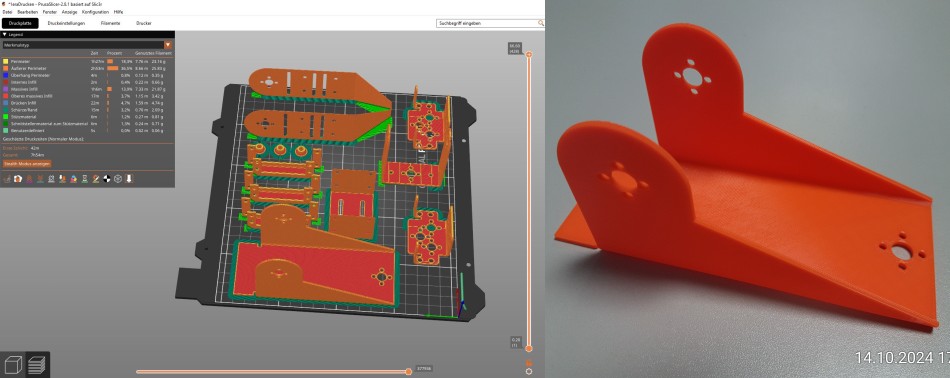
Sensorhalter
Für Herrn Bernd Klose haben wir diesen Sensorhalter gedruckt:

Gravierung USB-Hubs

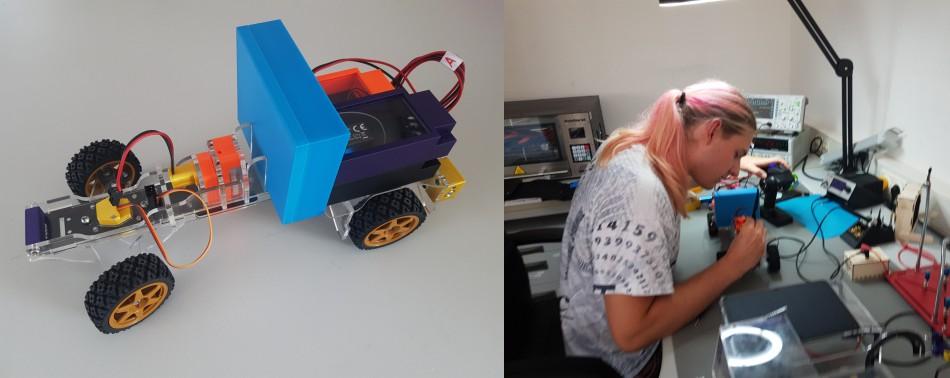
RC-Van
Die Studenten Benedikt Feit und Marvin Gärtner haben dieses ferngesteuerte Auto als modularen Bausatz entickelt:
Fab-Logo Brandeisen
For decorating our Buns, we made a branding iron in collaboration with the Lehrwerkstatt.
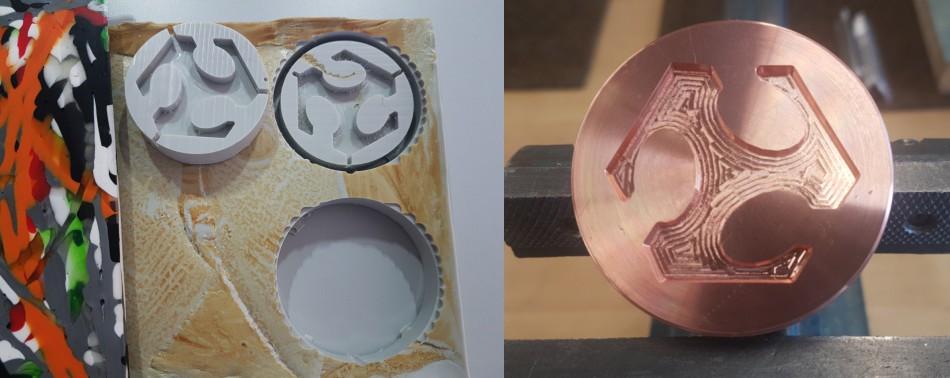
The first prototype was milled out of recycled HDPE-Plastic (Carvera) while the final pieces were milled out of brass on the 3-axis CNC in the Lehrwerkstatt.
Repair of Headphones
Jakob Lerch: Repair Hinge for Headphones ATH-MK40x
Reparatur Delonghi Siebträgermaschine
Using our Carvera 3-axis milling machine, we milled an aluminum piece in order to fix this Espresso-machine:

PCB für ein Mischpult
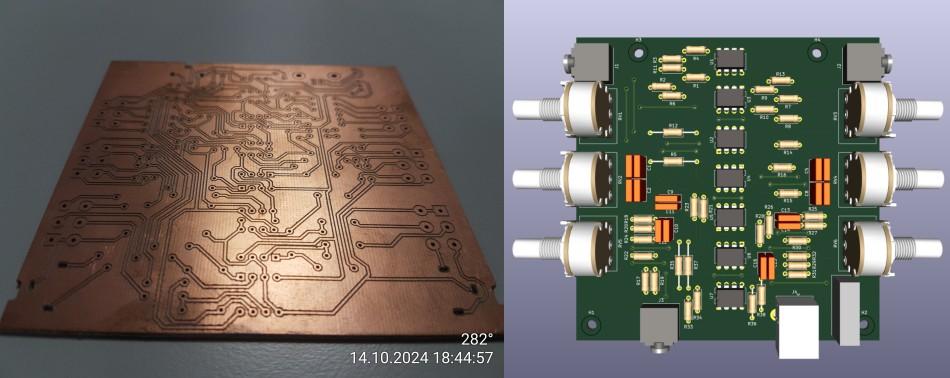 Zusammen mit Thore Lencer haben wir ein einseitiges PCB für einen Verstärker gefräst.
Zusammen mit Thore Lencer haben wir ein einseitiges PCB für einen Verstärker gefräst.
Grundlagen analoger Schaltungstechnik; Prof. Sommer
Ersatz-Zahnrad
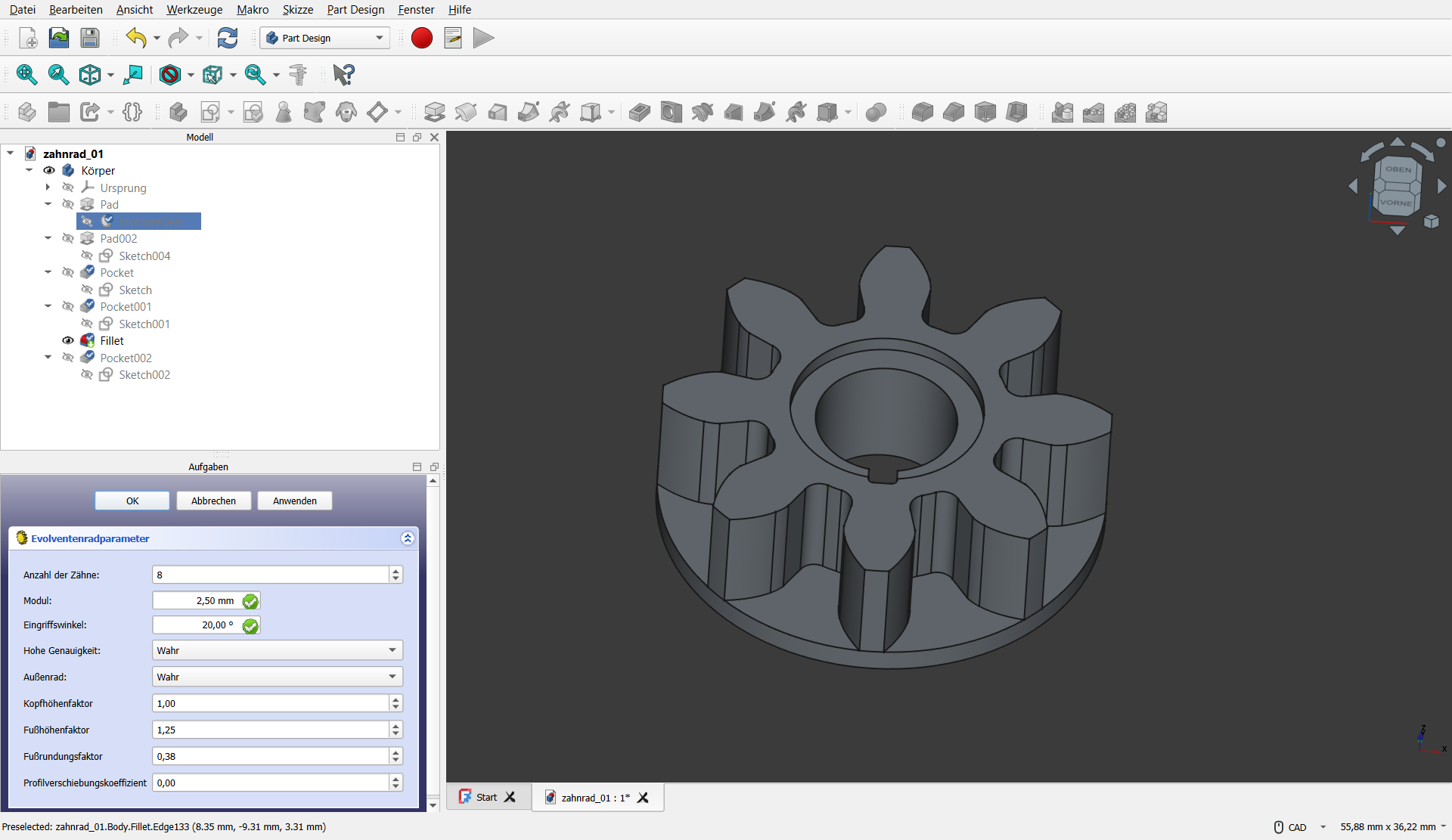
Ein weiteres Projekt für unsere Susanne ist ein Ersatz Zahnrad für einen Dönergrill-Drehspieß

The most difficult part was getting the gear right. I measured the inner and outer diameter of the gear (Kopfkreis Ø 25 mm and Fußkreis Ø 14 mm) and then asked DeepSeek for the modulus of the gear. The first time I didn't give it the amount of teeth and it gave me a long but useless answer. The second time it told me that the module is 2,5. Which turns out to be perfectly right. I used the Gear-Module in FreeCAD to model this gear:
I asked DeepSeek again just for completing this documentation, but it completely messed up:
My cog has an outer diameter of 25mm and an inner diameter of 14mm. The gear has eight teeth. What is the module?
Jarni's robots
Jarni Castillo printed some parts for his modular robot
2leggedRobot
In collaboration with Prof. Dr.-Ing. Gerald Schuller we are trying to help with his two-legged robot.
https://github.com/TUIlmenauAMS/2-Legged-Robots
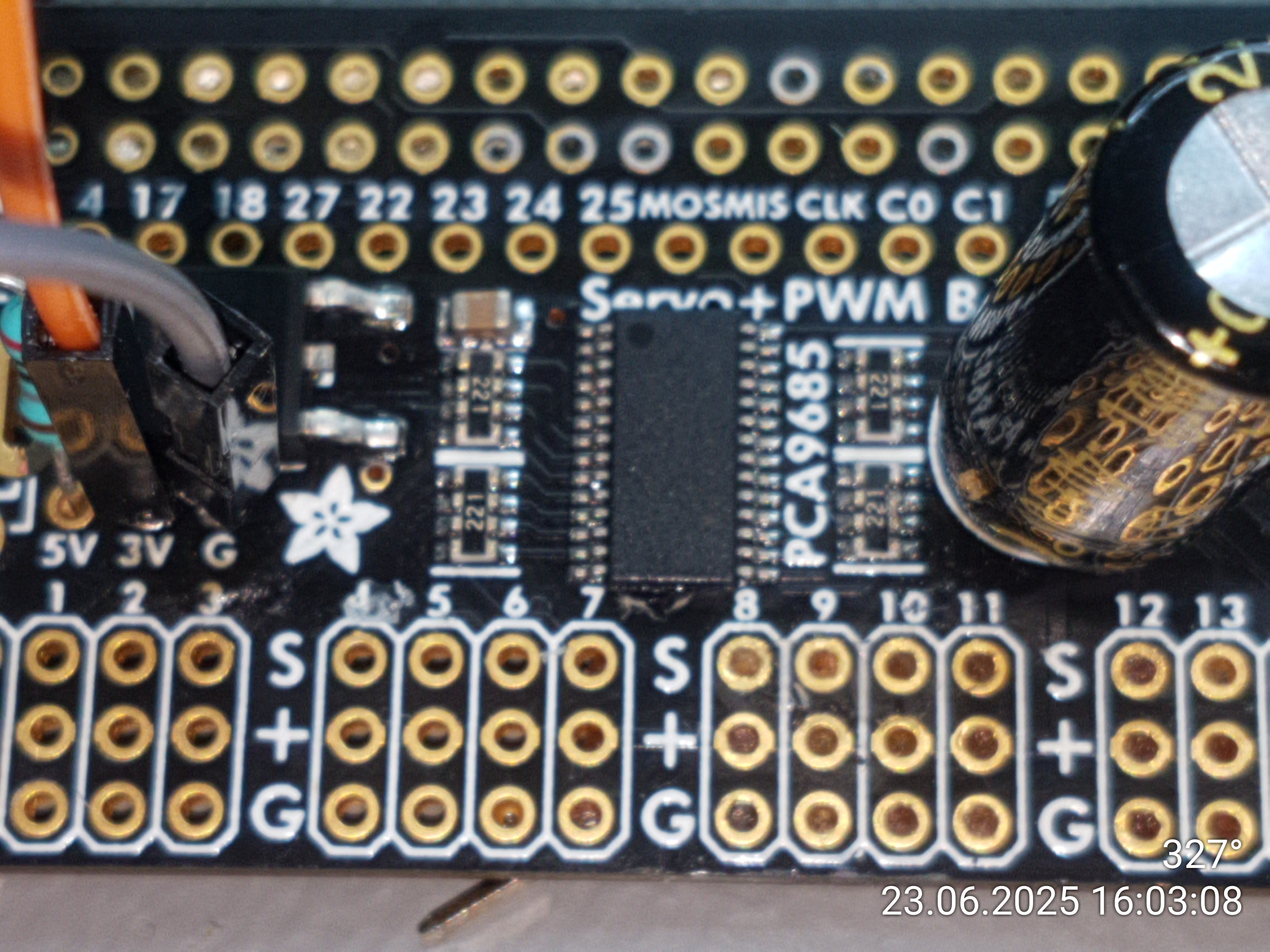
We are working on pressure sensors for the feet.
We wanted to try a material from Junior-Prof. Hongye Sun as a pressure sensor, but unfortunately the long-term signal repeatability does not seem to be consistent enough. We will continue to work with her and her team to hopefully improve the results.
After cleanup

labeling the wires
hotglue leftovers
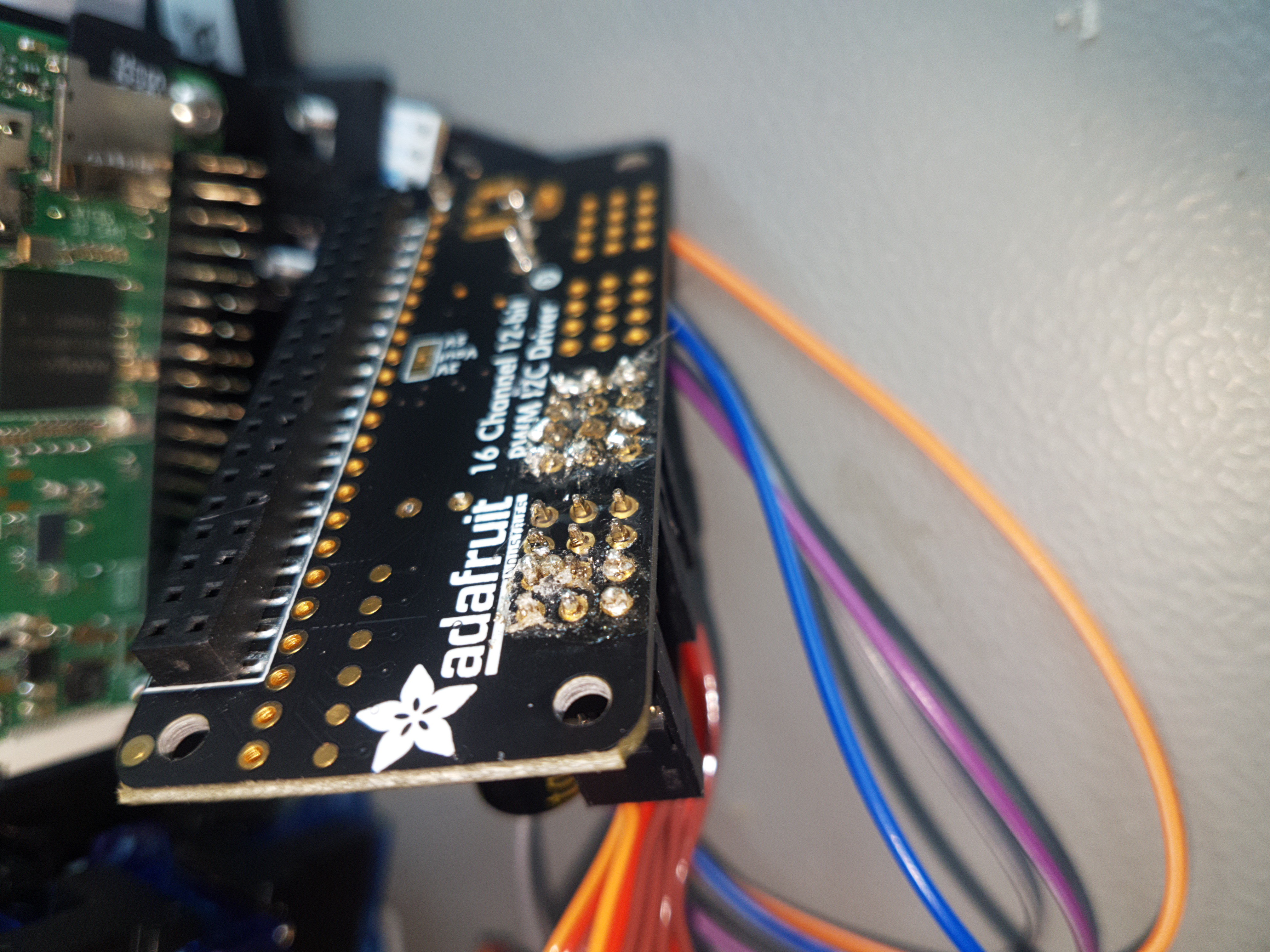
original situation
cleaning connectors
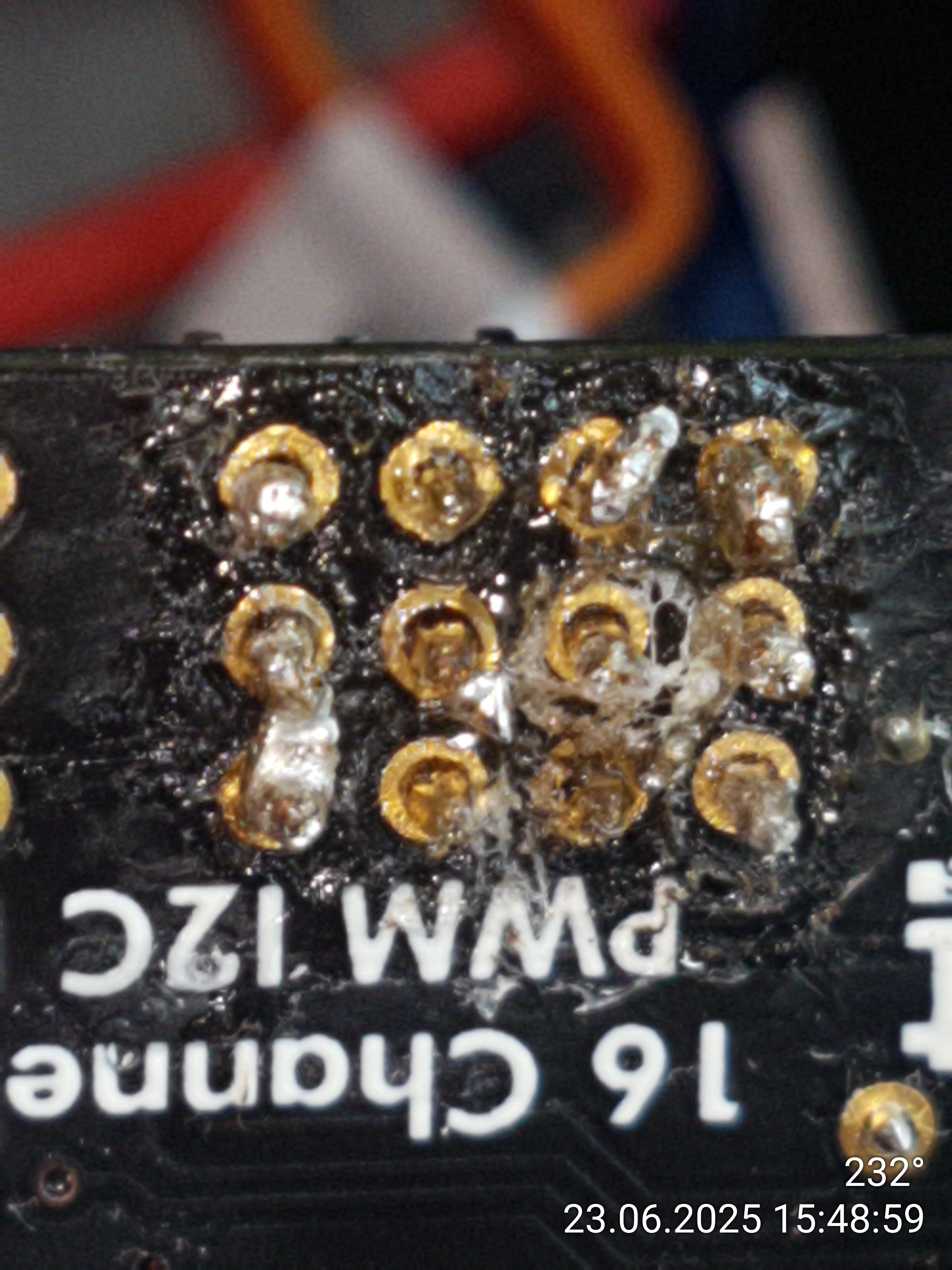
hotglue / solder - mess
Name | link | Datasheet |
Analog read with digital pin:
https://www.raspberrypi-spy.co.uk/2012/08/reading-analogue-sensors-with-one-gpio-pin/
Formulierung dehnbarer leitfähiger Tinten für 3D-Drucker vom Typ Direct Ink Writing (DIW)
Junior-Prof. Hongye Sun arbeitet mit Ihren Kollegen an einer Formulierung dehnbarer leitfähiger Tinten für 3D-Drucker vom Typ Direct Ink Writing (DIW)
In the fablab we tried to help with measuring the resistance of this material with a RaspberryPi Pico.
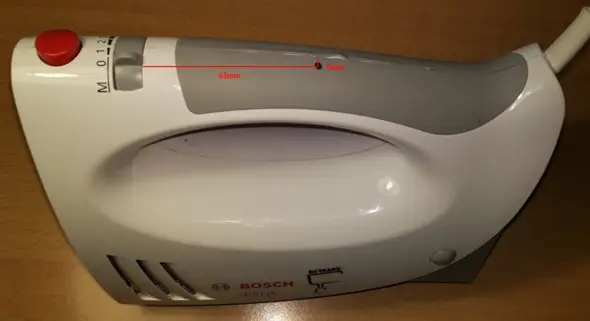
Reparatur Bosch-Handmixer MFQ3530/04
Anleitung zum Auseinanderbauen eines Bosch-Handmixers MFQ3530/04
https://youtu.be/zUCDC8c7Mfw?si=xyCjRCcBSx1NDzej
https://www.gutefrage.net/frage/wie-baue-ich-den-bosch-handmixer-mfq3530-auseinander


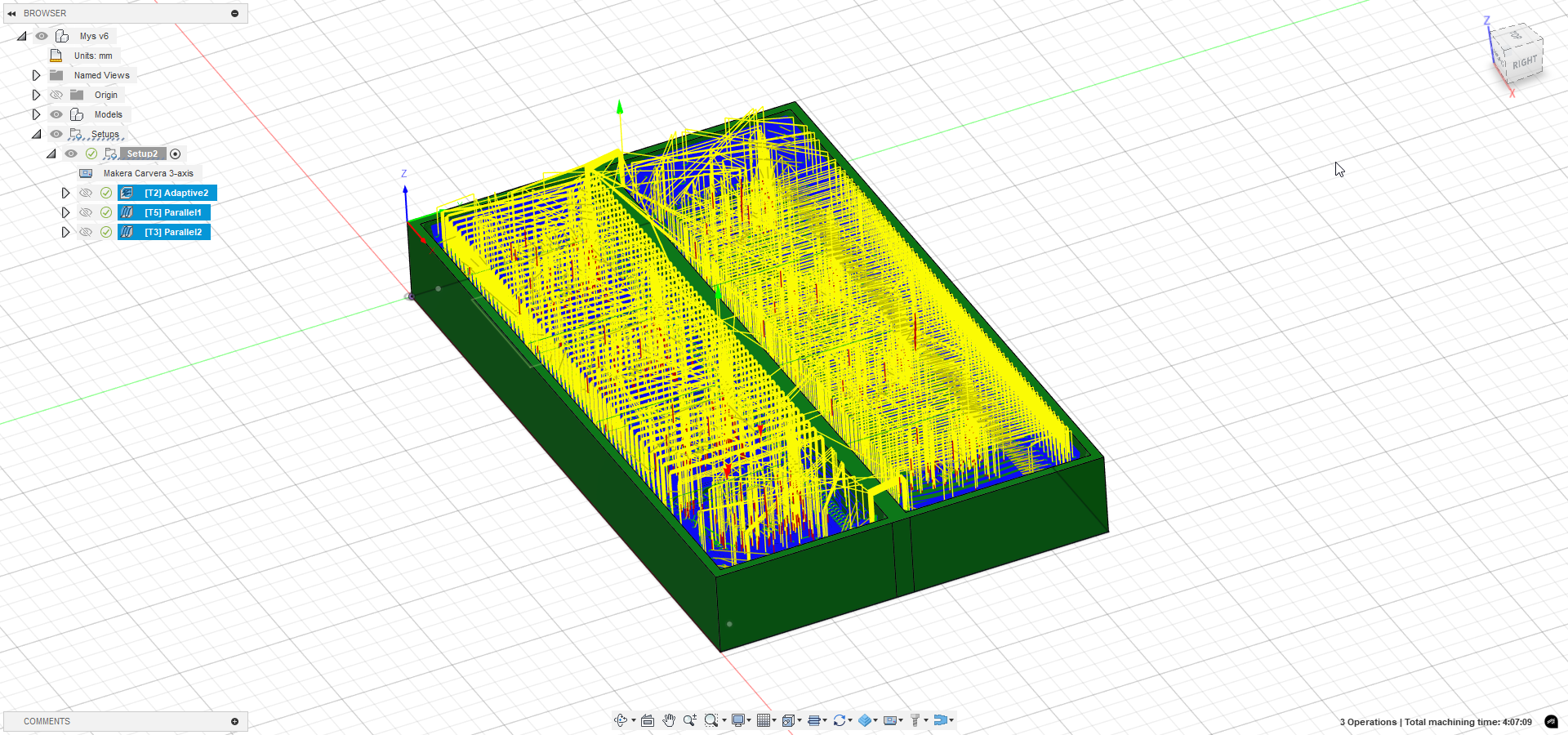
Msys

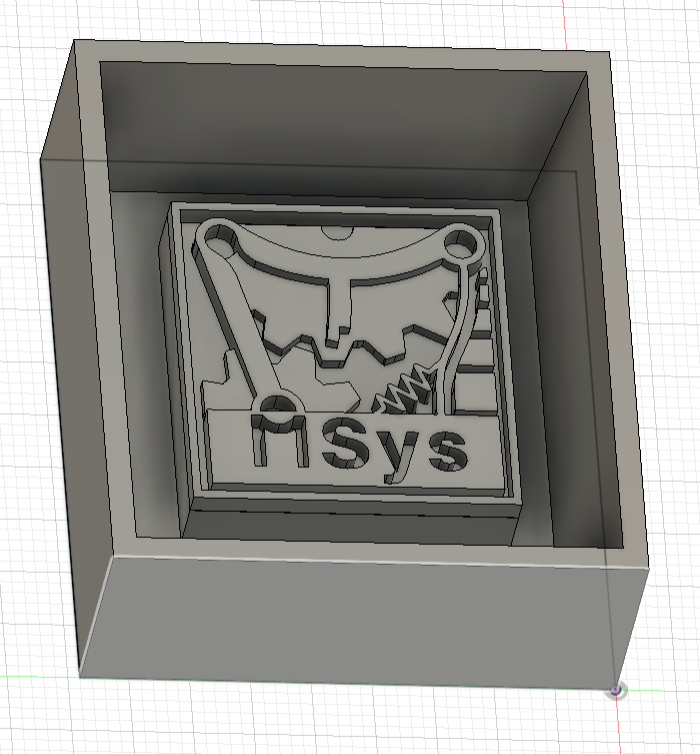
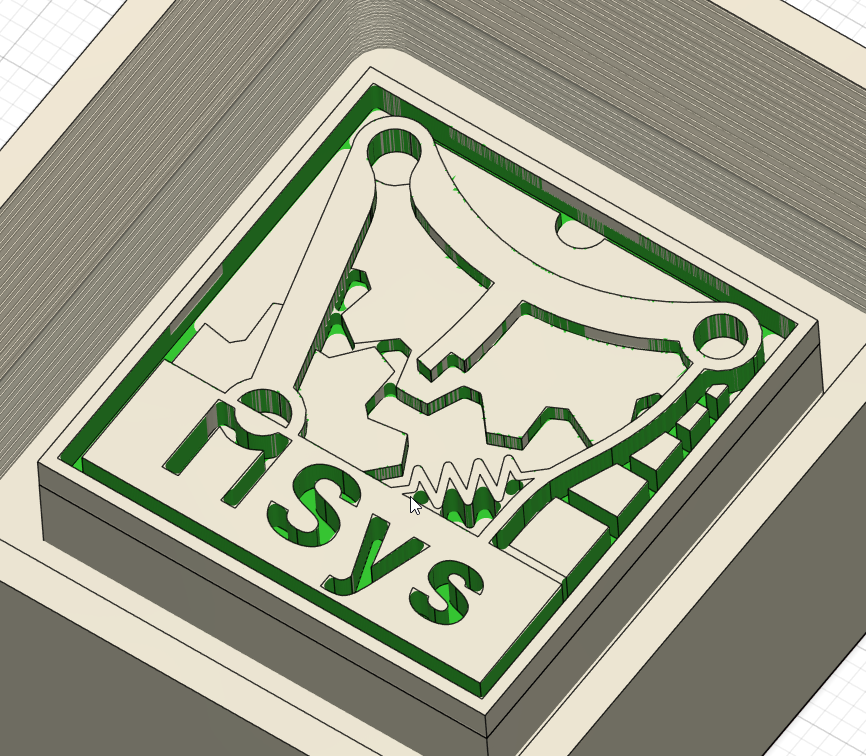

Block: 148 mm x 88 mm x 18,5 mm = 241944 mm³
Volume of mold: 241944 - 96361 = 144583 mm³



panema
3D Scan of a toy car
Stempel Bergfest
Short explanation on how to make stamps out of EVA-Foam:
First, the design should be made as a vector-graphic. This could be done in Powerpoint, Illustrator or Inkscape (any software that exports in .ai, .svg, or .pdf).
I'm using Inkscape as an example:
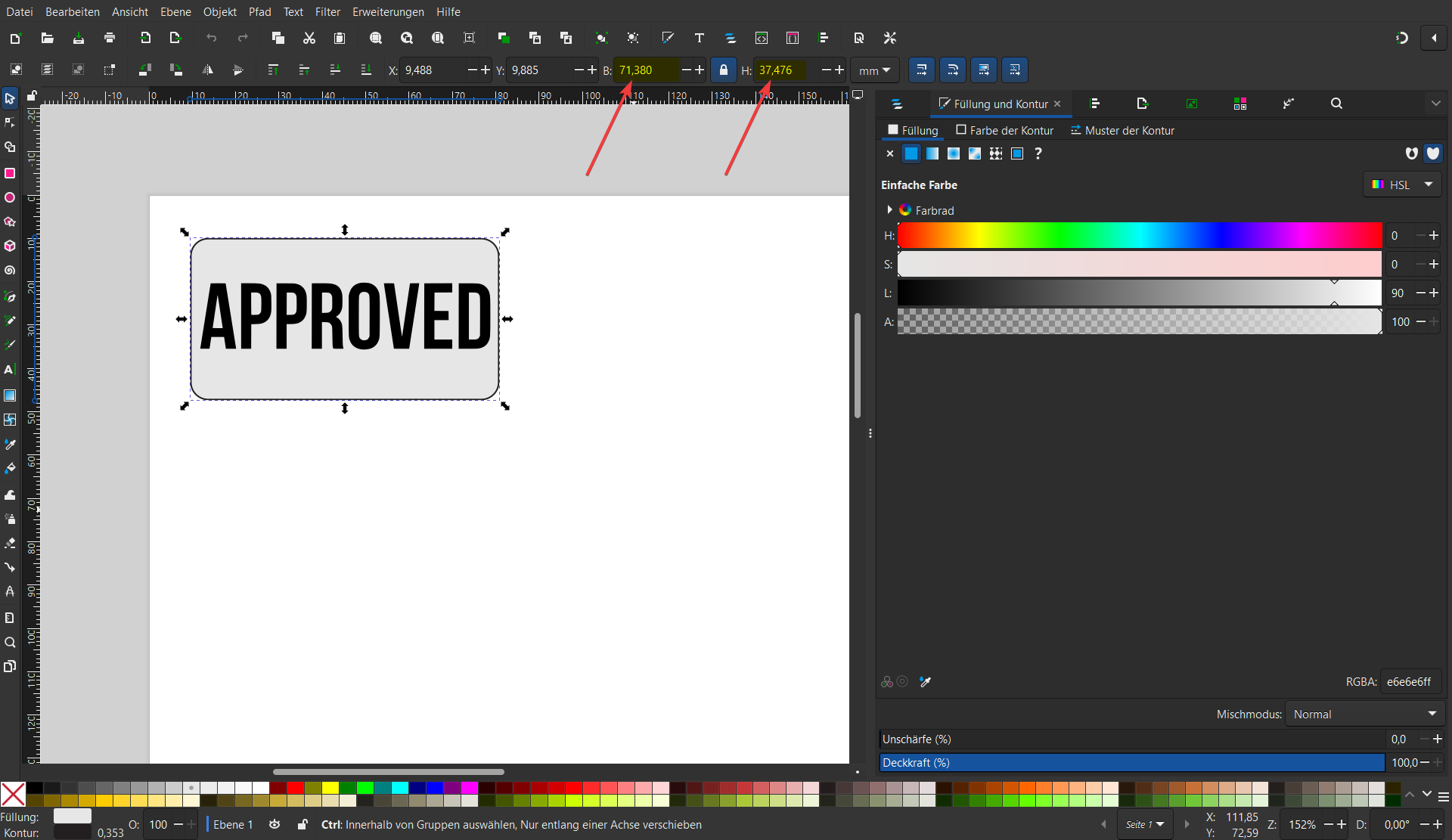
The dimensions should be to scale.
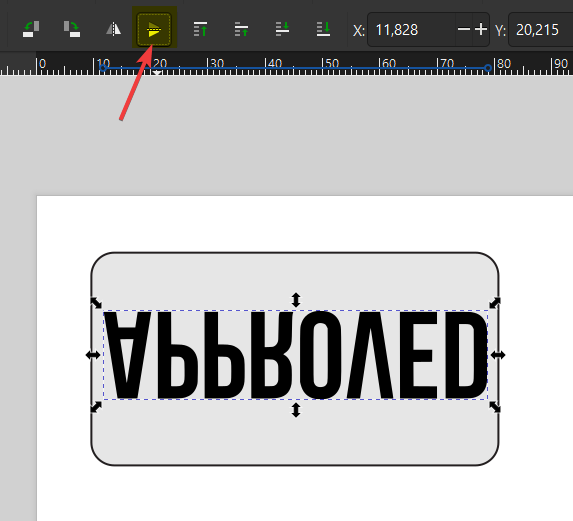
In the next step we mirror the design (horizontal or vertical):
In order to engrave the space between the letters, we have to duplicate the box and subtract the text from it. Select the box, then shift select the text and hit "Strg + -" (Pfad --> Differenz) I gave it a blue fill color for engraving. I made the outline red for cutting.
Then we go to file --> Save as... and choose  with the default settings.
with the default settings.
In RDWorks we can import with "File --> Import". Make sure that the dimensions are correct by selecting everything and comparing it to the bounding box size in Inkscape.
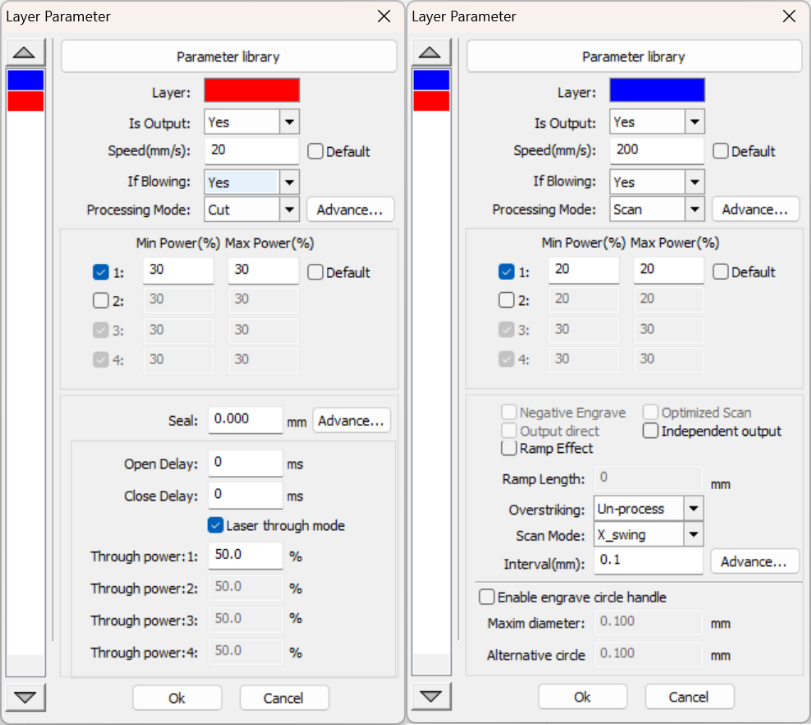
These are the settings I used for engraving and cutting:
The final result should look like this:
